Firmware Part 3
Feb 23, 2015
Capacity measurement
In the last post I explained the calculation of the current using the ADC measurements. Now we come to the calculation of the used capacity.
What we need
We want to get the battery capacity used in something like mAh. This is near to the used energy if we do the incorrect assumption, that the voltage is fixed. But for the Ampere-hour we don’t need the voltage.
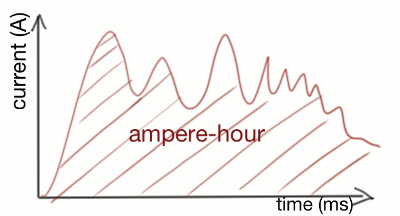
What we want to calculate is the red area under the current curve. This is an integral over the time.
What we have
The sensor measures the current in timer triggered intervals (in our case 40ms, but the time is variable in the calculation).
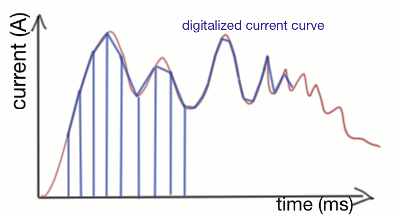
We store the actual measurement res2 and time of the measurement time2 and the
measurement before res1 and time1. After each calculation res2 becomes res1 and
a new measurement is done to res2.
The calculation
We need to get the surface of the blue tetragon. If we think of mirroring the same tetragon
on top this is a rectangle with one edge res1 + res2 and the other time2 - time1.
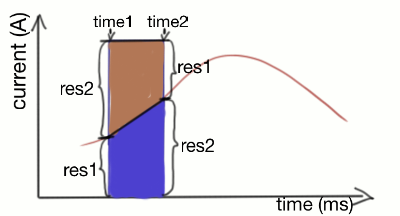
This can be easily calculated.
Ah = (res1 +res2) * (time2 - time 1) / 2
or
Ah = (res1 +res2) / 2 * (time2 - time 1)
Now this is combined with the current calculation of the last post.
We check for clipping. Then calculate the y-axis and subtracting adc_b for 0A.
Because we then divide by 2 (here a right shift by 1 (>> 1)) we need to double adc_b
(again done by a left shift). Then we multiply by the time period and use ACS_R_M_O
and the correcting shift by ACS_SHIFT_M to get mAms (miliamps by miliseconds).
1 uint32_t calc_cap_mAms(uint32_t res1, uint32_t res2, uint32_t time1, uint32_t time2) {
2 if( adc_b >= res1 ) res1 = adc_b; //clipping to zero
3 if( adc_b >= res2 ) res2 = adc_b; //clipping to zero
4 //for time in 1ms per bit
5 return (((uint32_t)(((res1 + res2 - (adc_b << 1)) >> 1) * (time2 - time1) * ACS_R_M_O)) >> ACS_SHIFT_M); }So every 40ms we get a very small chunk of mAms used capacity. But even if we have a 32bit variable this is only 1193 mAh. Not enough for most models.
Getting the result
To transform mAms to mAh we just need to divide the mAms by 3600,000. But if we do that every measurement with the small chunks, we wont get any result. So in the main.c the mAms are added and checked if its greater than 1 mAh = 3600,000 mAms. If so we increase the used capacity in mAh by 1 and substract 3600,000 from the mAms variable.
1 //Check for capacity overflow
2 if( cap_mAms >= 3600000 ) {
3 cap_mAms -= 3600000; //- one mAh
4 cap_mAh++; //+ one mAh
5 flight_cap.cap = cap_mAh; //set capa used for flight pack capacity sensor
6 power.cap1--; //subtract from capacity output
7 //Check for alarm: under BAT_MIN (for powerbox sensor only)
8 if( power.cap1 <= cap_min ) {
9 power.cap1_alarm = true;
10 }
11 }Then we set the flight_cap.cap for the Spektrum Flight Pack Capacity sensor and power.cap1 for the Powerbox Cap1 Sensor value (this is counted down). If power.cap1 goes under 20% of the full battery capacity the Powerbox alarm is triggered.
This is it for the core firmware functionality. There are additional setup functions and all the stuff around the BMP180 pressure / altitude sensor. I might or might not cover that in a later post.
Share